NVIDIA Jetson YOLO Object Detection
Demos showcase how to convert pre-trained yolov3 and yolov4 models through ONNX to TensorRT engines. The code for these 2 demos has gone through some significant changes. More specifically, I have recently updated the implementation with a "yolo_layer" plugin to speed up the inference time of the yolov3/yolov4 models.

What is a YOLO object detector?
When it comes to deep learning-based object detection, there are three primary object detectors you’ll encounter:
- R-CNN and their variants, including the original R-CNN, Fast R- CNN, and Faster R-CNN
- Single Shot Detector (SSDs)
- YOLO
You Only Look Once: Unified, Real-Time Object Detection
https://arxiv.org/pdf/1506.02640v3.pdf
YOLOv4
With the original authors work on YOLO coming to a standstill, YOLOv4 was released by Alexey Bochoknovskiy, Chien-Yao Wang, and Hong-Yuan Mark Liao. The paper was titled YOLOv4: Optimal Speed and Accuracy of Object Detection
Author: Alexey Bochoknovskiy, Chien-Yao Wang, and Hong-Yuan Mark Liao
Released: 23 April 2020
YOLOv3
YOLOv3 improved on the YOLOv2 paper and both Joseph Redmon and Ali Farhadi, the original authors, contributed.
Together they published YOLOv3: An Incremental Improvement
The original YOLO papers were are hosted here
Author: Joseph Redmon and Ali Farhadi
Released: 8 Apr 2018
We’ll be using YOLOv3 , YOLOv4 in this blog post, in particular, YOLO trained on the COCO dataset.
The COCO dataset consists of 80 labels.
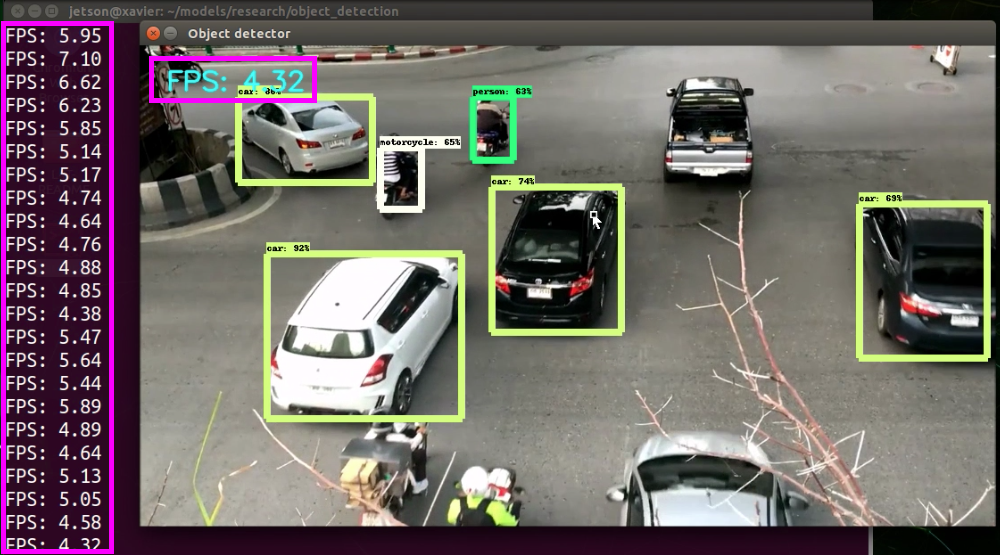
YOLOv3-416
Image : 4.46 FPS.
Video : 4.35 FPS.
YOLOv3-tiny-416
Image : 22.30 FPS.
Video : 20.58 FPS.
YOLOv4-416
Image : 4.46 FPS.
Video : 4.35 FPS.
Image : 24.09 FPS.
Video : 22.33 FPS.
YOLOv4-tiny-416
For NVIDIA Jetson Nano
Image : 22.41 FPS.
Video : 20.47 FPS.
Image : 47.93 FPS.
Video : 43.13 FPS.
Compare Performance

Video MP4 ( 960x540 )

Image JPG ( 768x576 )



Compare Nano vs. Xavier NX


Run NVIDIA GPU GTX1070



YOLOv4-416 ( TensorRT FP16 )
YOLOv4-tiny-416 ( TensorRT FP16 )
Compare Performance



NVIDIA GPU GTX1070 Object detection with YOLOv4-tiny-416
Reference
TensorRT demos
https://github.com/jkjung-avt/tensorrt_demos
You Only Look Once: Unified, Real-Time Object Detection
https://arxiv.org/pdf/1506.02640v3.pdf
YOLOv3: An Incremental Improvement
https://arxiv.org/pdf/1804.02767.pdf
YOLOv4: Optimal Speed and Accuracy of Object Detection
https://arxiv.org/pdf/2004.10934.pdf
DarkNet YOLO
https://github.com/AlexeyAB/darknet
YOLO Object Detection
https://pyimagesearch.com/2018/11/12/yolo-object-detection-with-opencv/
Website : https://softpower.tech